Código de Arduino para funcionamiento del módulo L298N con motores DC
Lista de materiales
- 1 Módulo L298N
- 2 motores DC de 3V a 6V
- 2 ruedas
- Fuente de voltaje adicional de 7.5V a 9V
- 1 placa de Arduino uno
- cables jumper
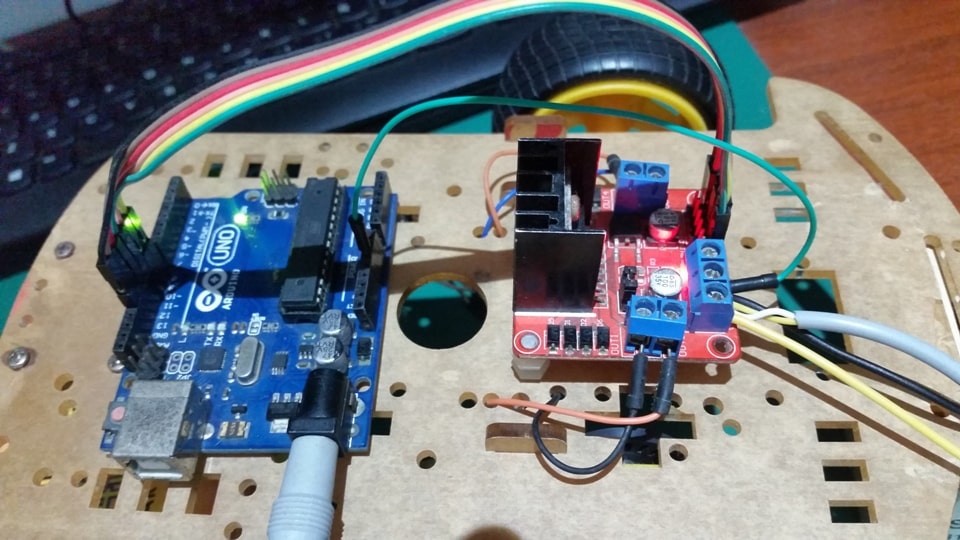
Conexiones de hardware
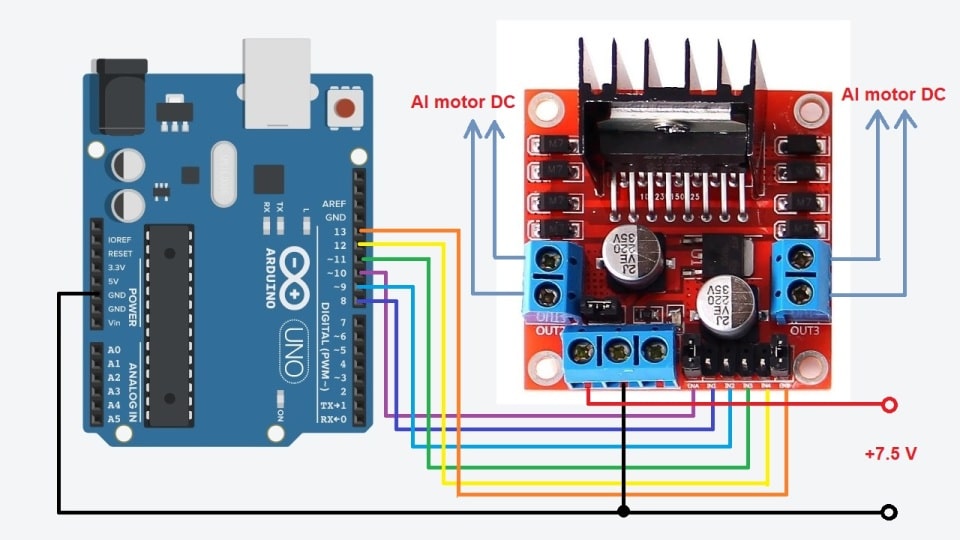
Este módulo L298N es común para usarlo en el control de motores DC, para este ejemplo se puede usar para mover las ruedas de un rover. Se puede instalar de la siguiente manera:
- Del terminal ENA se debe conectar al pin 10 de arduino
- Del terminal IN1 se debe conectar al pin 8 de arduino
- Del terminal IN2 se debe conectar al pin 9 de arduino
- Del terminal ENB se debe conectar al pin 11 de arduino
- Del terminal IN3 se debe conectar al pin 12 de arduino
- Del terminal IN4 se debe conectar al pin 13 de arduino
Debemos tener en cuenta que para esta instalación se necesitan dos fuentes de voltaje. Una para la placa arduino y la otra para el módulo L298N. Para este efecto tenemos que unir los GND o tierra de los dos circuitos por lo que se tiene que poner un cable jumper entre estos puntos.
La fuente de voltaje de 7.5 V también puede ser reemplazada por 6 pilas de 1.5 Voltios en su respectivo porta pilas.
Estructura del programa o sketch
Este programa tiene por finalidad hacer girar los ejes de los motores DC (conectados ruedas) durante 3 segundos y luego se detiene por otros 3 segundos. Luego se repite indefinidamente por efecto del bucle de la funcion void loop.
----------------------------------------------
int IN1 = 8;
int IN2 = 9;
int ENA = 10;
int IN3 = 11;
int IN4 = 12;
int ENB = 13;
void setup(){
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENB, OUTPUT);
}
void loop(){
digitalWrite(ENA, HIGH);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(ENB, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
delay(3000);
digitalWrite(ENA, LOW);
digitalWrite(ENB, LOW);
delay(3000);
}
---------------------------------------------
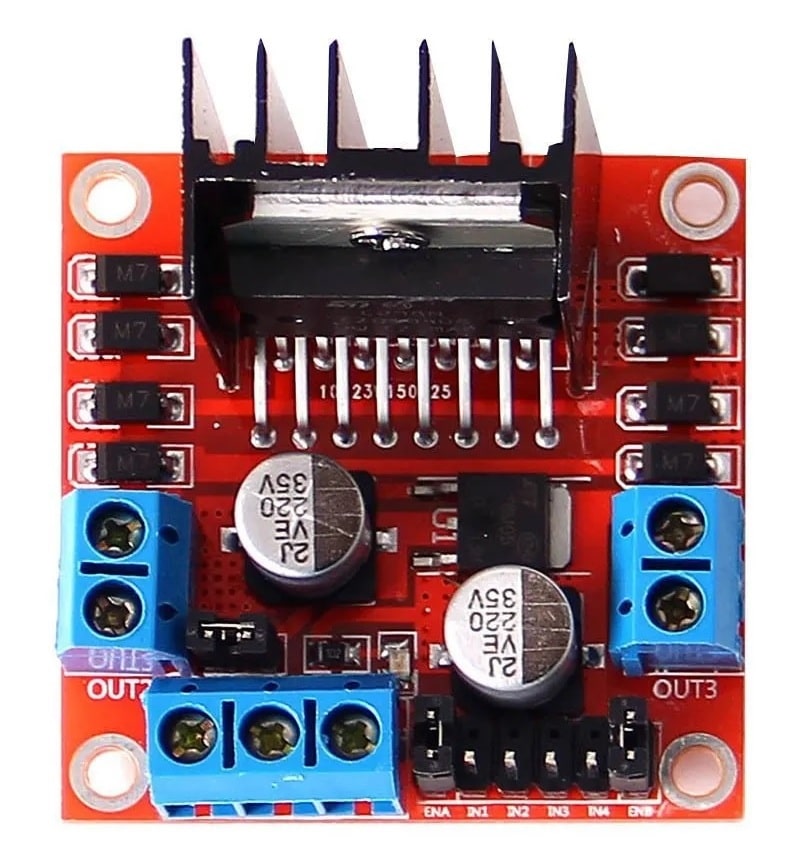
¿Qué función tiene el módulo L298N?
El módulo L298N es una tarjeta para el control de motores de corriente directa, motores a pasos, solenoides y en general cualquier otra carga inductiva. Su componente principal es el circuito integrado L298N, el cual dispone en su interior de 2 puentes H independientes con capacidad de conducir 2 amperios constantes o 4 amperios en picos no repetitivos. La tarjeta expone las conexiones hacia el motor a través de bloques de terminales (clemas), mientras que las entradas de control y habilitación del puente H son accesibles a través de headers macho estándar. Esta tarjeta es ideal para controlar motores en pequeños robots como seguidores de lineas, sumos, robots de laberinto, etc.
Características de L298N puente H doble controlador de motor
- Circuito Integrado principal: L298N
- Corriente pico de operación: 4 Amperios
- Corriente constante de operación: 2 Amperios
- Bajo voltaje de saturación en los transistores de salida
- Corte de operación por sobrecalentamiento
- Voltaje de alimentación de motores de hasta 46 volts
- Excelente inmunidad al ruido eléctrico
- Ideal para controlar motores en aplicaciones de robótica
¿Qué es el motor DC?
Los motores DC (Direct Current o corriente directa) son los más simples. Tienen dos terminales; cuando uno se conecta a una fuente de alimentación
continua y el otro se conecta a tierra el motor gira en una dirección. Si se intercambia la conexión de los terminales (el que estaba conectado a tierra pasa a estar
conectado a la fuente, y viceversa), el motor girará en la dirección contraria. Cuanta más intensidad de corriente atraviese el motor (es decir, cuanto más voltaje se le aplique, si suponemos su resistencia constante), girará a más velocidad de una forma casi linealmente proporcional.
En general, los motores DC realizan un consumo eléctrico bastante elevado para conseguir la velocidad de giro adecuada. Esto quiere decir que muchas veces el
pin de “5 V” de nuestra placa Arduino no será suficiente, y el motor deberá ser alimentado a partir de una fuente externa.

Contenido
Primeros pasos con Arduino Instalación del IDE Código para hacer parpadear un Led Código para controlar la luz de un Led con potenciómetro Código para controlar led RGB con PWM Código para luces secuenciales de 8 leds Código para encender un Led con pulsador Código para encender un Led con fotoresistencia LDR Código para sensor de temperatura Código para servomotor Código para generar sonido con zumbador o buzzer Código para sensor de ultrasonido HC-SR04 Código para Módulo LCD 1602A Código para módulo L298N y motores DC Código para semáforoRecomendados:
Un día como hoy 19/04/2024
Es la compañía de telecomunicaciones más importante de Europa y la quinta a nivel mundial.

Mensajitos
Aquí puedes encontrar: Frases bonitas y cortas, palabras de agradecimiento, poemas originales, cartas para toda ocasión y mas.